D3PMZ-1100-P3 Delta Roboto
Produkta Karakterizaĵo
Karakteriza
1、La norma ciklotempo estas malpli ol 0.5s, renkontante vian serĉadon por la alta rapido kaj la minimuma volumo.
2, Altnivela dezajno de la rotacia motoro sur moviĝanta platformo, ebligas al la roboto facile atingi altan rotacian precizecon.
3、La roboto estas ideala por mallarĝaj spacaj operacioj, same kiel altrapida kaj alta precizeco en 3C-kampo.Vaste uzata en muntado, manipulado kaj testado de malgrandaj laborpecoj.
Produktaj Parametroj
| Tajpu | D3PMZ-1100-P3 | |
| Aksoj | 3+1 | |
| Utila ŝarĝo | 3 kg | |
| Manipulatoro | Pezo | 85 kg |
| Diametro | 1100mm | |
| Ripeteblo | Pozicio | 0.05mm |
| Rotacio | 0.05º | |
| Rotacia Gamo | ± 360° | |
| Maksimuma Rapido | 540pp/min | |
| Permesebla Maksimuma Momento de Inercio | 31 × 10-4kg .m2 | |
| Angula Gamo de Akciita Brako | Supren | 32.5º |
| Malsupren | 68.5º | |
| Elektroprovizo | Trifaza 380VAC -10%~+10%, 49~61HZ | |
| Potenca Kapacito | 10KVA | |
| Taksita Potenco | 6.1kw | |
| Tenada Temperaturo | -10 ℃ ~ 70 ℃ | |
| Labormedio | -10℃~50℃,RH≤80% | |
| Protekto | IP55/IP67 | |
Produkta Desegno
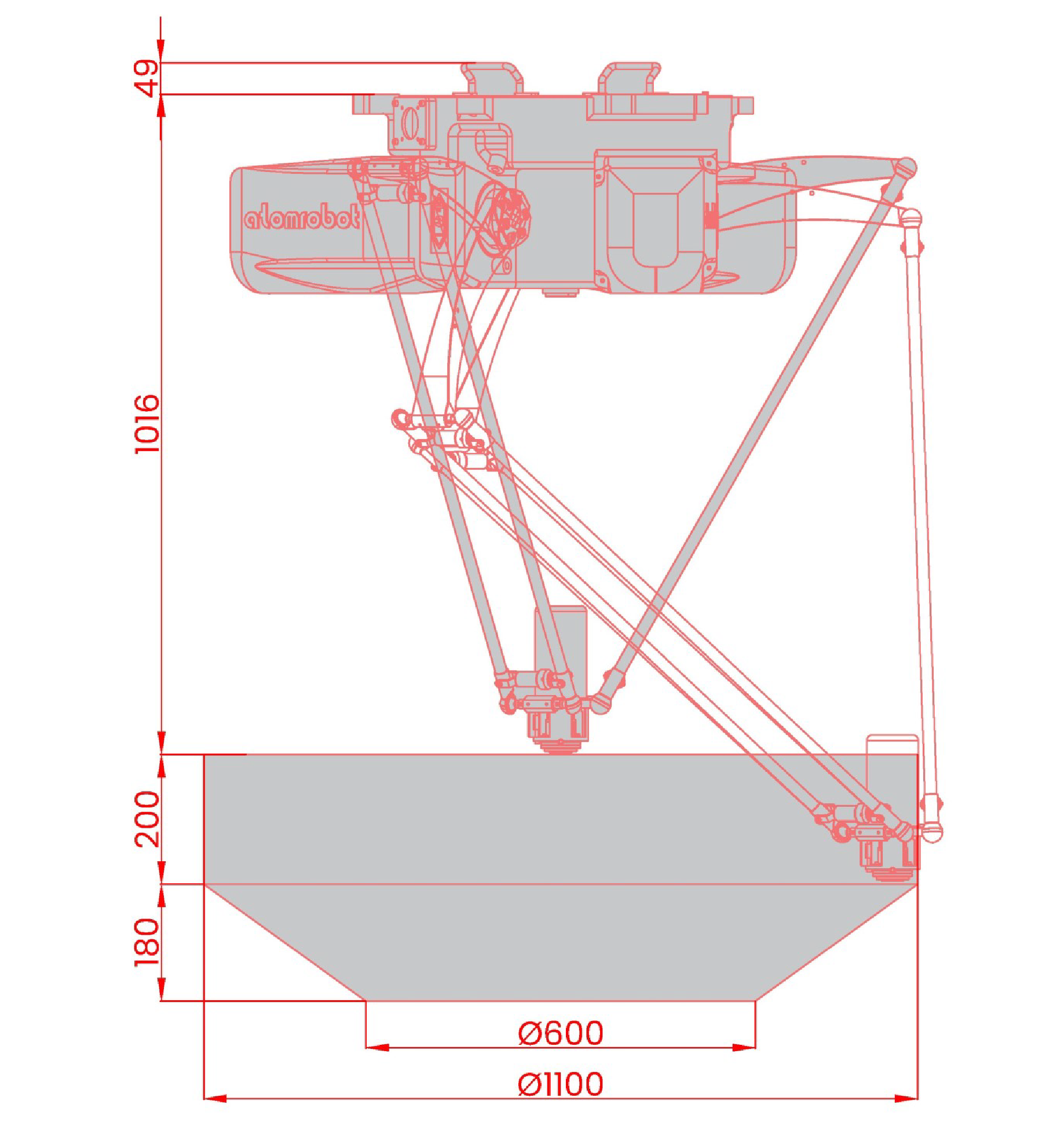
01.Dimensioj kaj Labora gamo (mm)
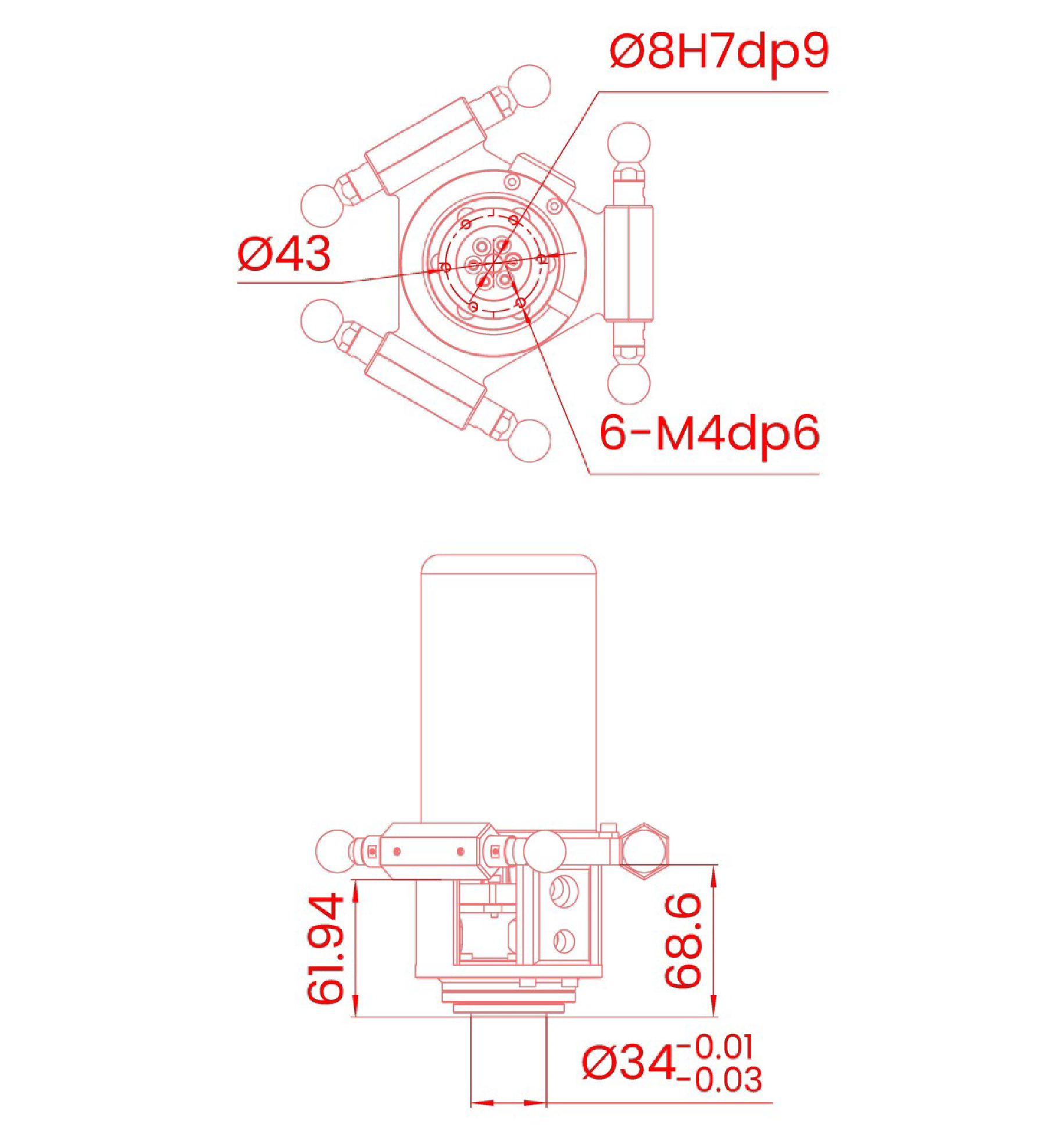
02. Flanĝo (mm)
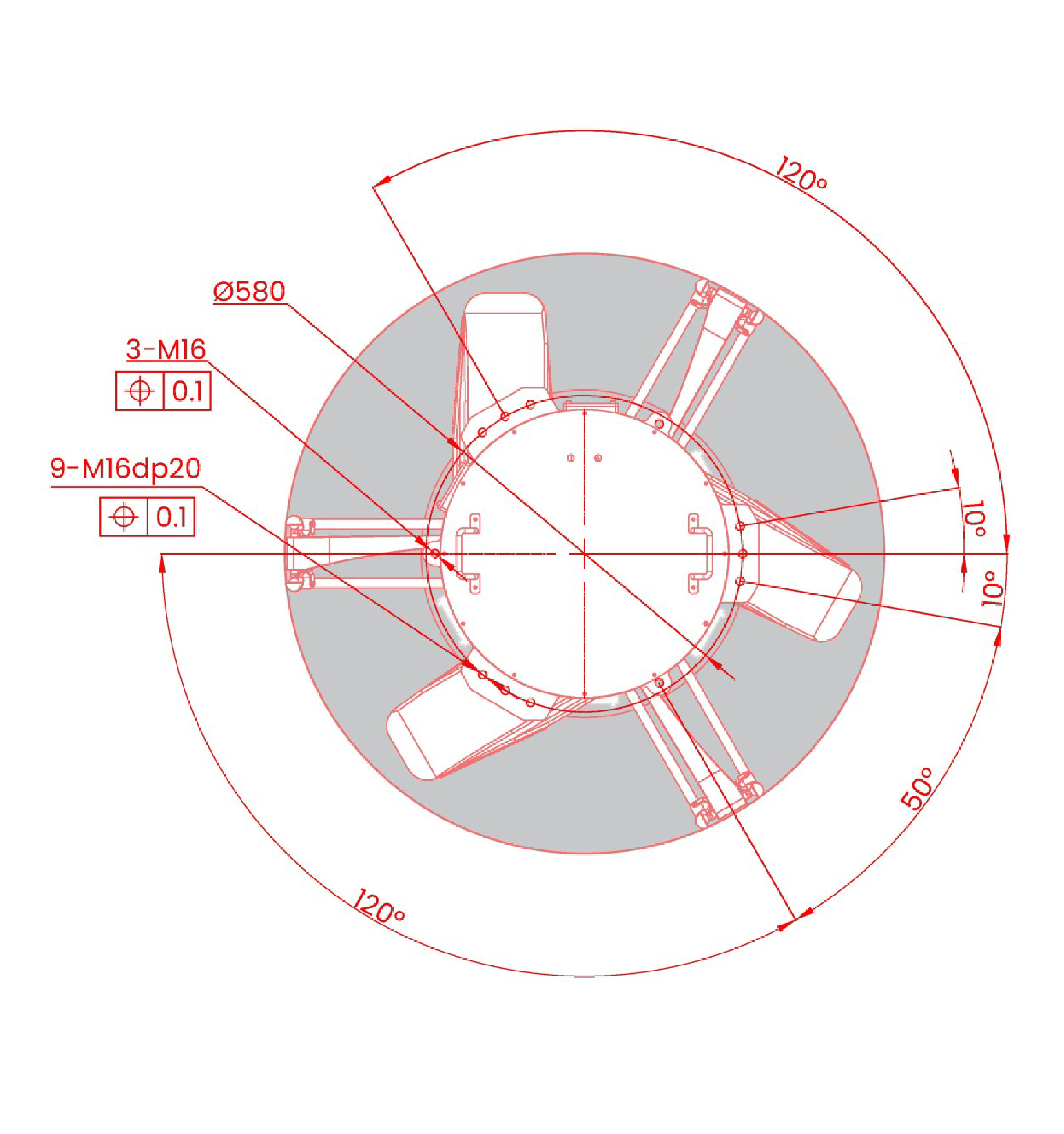
03.Baza instalado (mm)
Skribu vian mesaĝon ĉi tie kaj sendu ĝin al ni